rovate
LOW-COST BIPED
DEVELOPMENT PLATFORM
研究開発を加速する
二足歩行プラットフォーム
Innovate. Activate. Cultivate.
robate(ロベート)シリーズの第一弾として2足歩行ロボットを開発いたしました。
このロボットには8個のサーボとIMUセンサー(慣性計測センサー)を搭載し、M5CoreS3SEによる制御が可能です。バッテリー搭載タイプもあり、ケーブルレスで実働できる事を想定しています。
歩行などの運動制御を研究開発している方をターゲットに運動制御ソフト(デモソフトは無償配布)以外を製品化し提供いたします。受託開発により4足歩行化やロボットアーム追加なども設計対応可能です。
※このロボットはソフトウェア開発者(ROS、NVIDIA Omniverse等)向けです。購入しただけで歩くなどの運動はできません。
Concept / Mission
ロボット開発を”基盤”から支える
rovate(ロベート)は単なるロボット製品ではなく、
ロボット研究開発を加速するための基盤プラットフォームです。
ロボット開発をもっと身近にするため、ホビー用のサーボ、マイコン、センサーを採用し、3Dプリンターの構造体でロボット開発のプラットホームを提案します。
Mission: ロボット開発の敷居を下げ、創造を加速する
Why rovate?
導入しやすい価格設計
ホビー用サーボと3Dプリント構造を採用し、研究用二足歩行機体のコスト障壁を大幅に低減。 小ロット製造でも現実的な価格で導入可能です。
即日実験開始
機構設計・通信実装済み、IMU搭載。 届いたその日から制御アルゴリズム開発や実証実験に集中できます。
制御基盤は既にOSS公開
制御ソフトウェアのベース部分は既にオープンソースとして公開。 さらに将来的には、3Dプリント可能な本体設計データの公開も計画しています。
Target Audience / Applications
近年、ヒューマノイドロボットや人型ロボットへの社会的関心が高まっています。
rovateシリーズ第一弾 ZT-rovate-BP08A は、ヒューマノイド開発の初期研究・実証フェーズを加速するための開発プラットフォームです。本製品は、ヒューマノイドロボットの制御検証、姿勢安定化、歩行アルゴリズム研究など、基礎研究から応用開発までを支援します。
大学・研究機関
アルゴリズム検証、群制御の研究、教育カリキュラムとして。
企業R&D部門
新規ロボット事業のプロトタイピング、技術実証のベース機体として。
教育機関
工学系学部での実践的なロボット工学演習に。
Market Positioning
競合優位性とポジショニング
rovateは「完成品」ではなく“開発加速プロダクト”です。高額な産業用ロボットで試行錯誤を行うのではなく、まずは低コスト環境で制御理論・通信設計・動作検証を完成させる。実証が成立した段階で、耐久性・安全規格・量産設計へ移行する。rovateは、その初期開発フェーズを最短化するための戦略的プラットフォームです。
手頃な価格でカスタム可能なロボット
The rovate Series Expansion
共通アーキテクチャによるシリーズ展開構想
rovateシリーズは、単発のロボット製品群ではありません。それは、拡張可能なロボティクス共通アーキテクチャです。
ZT-rovate-BP08Aの開発を通じて、ロボット設計に不可欠な要素技術を統合し、機構・制御・通信を横断する再利用可能な基盤を確立しました。この基盤により、以下を実現します。
rovateシリーズは、製品を増やすのではなく、技術資産を連続的に進化させるブランド戦略です。
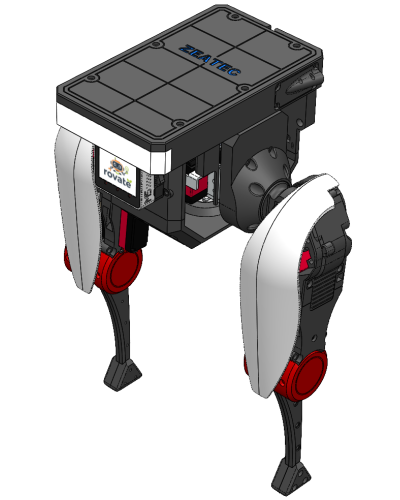
ZT-rovate-BP08A
Biped Platform
rovate-AR
(Arm Robot / アームロボット)
rovate-CL
(Collaborative / 協働モデル)
rovate-ED
(Education / 教育特化モデル)
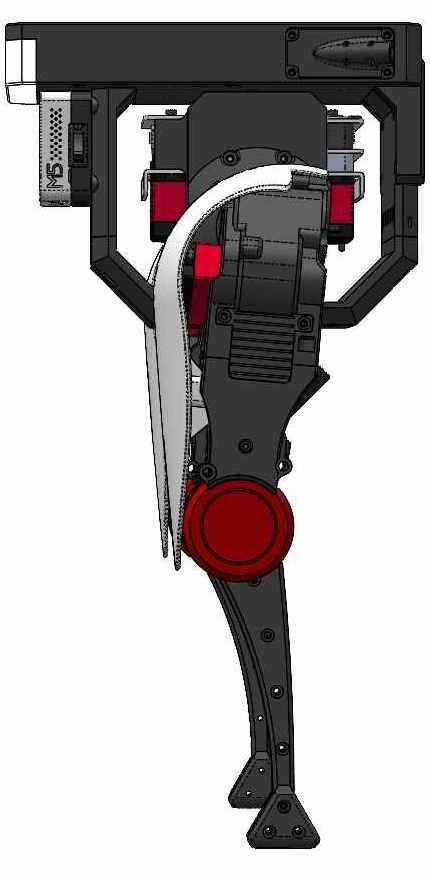
rovate-BP-08A Hardware Features
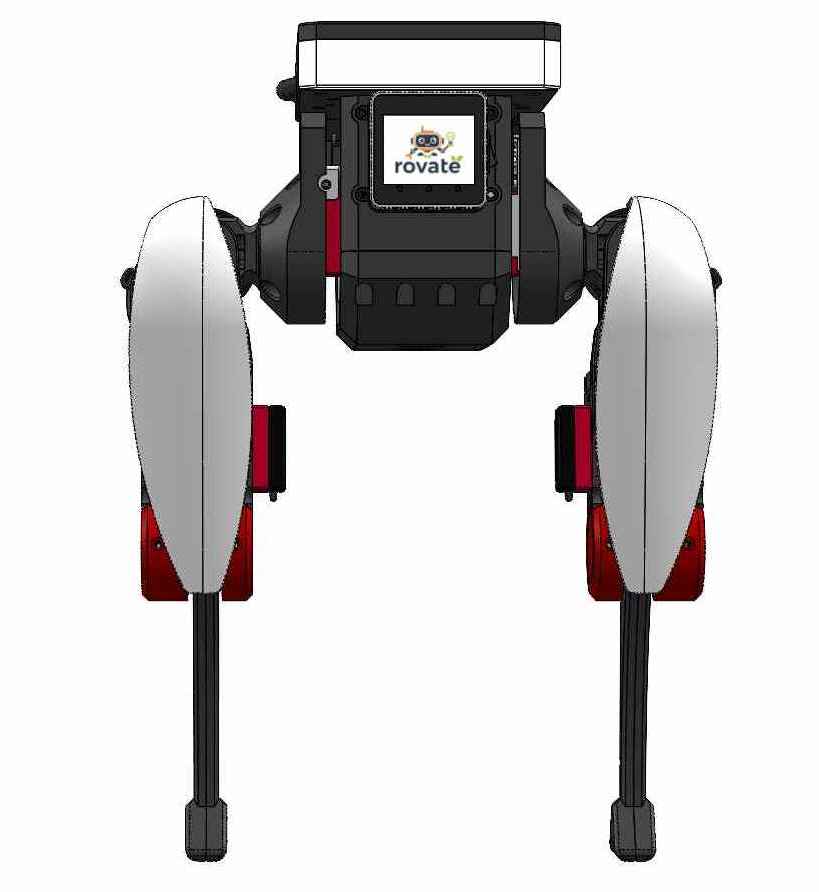
汎用性の高く入手性の良いホビー用サーボ(トルク:40kg・cm)8軸構成。
フレームは3Dプリンター製。基本のABSに加え、耐熱・耐薬品性に優れるPAHT-CF(カーボン配合ナイロン)などで製作。
背面にバッテリー搭載マウント、IMUセンサーを標準内蔵。※1
デスク上で実験可能なコンパクトサイズ。
rovate-BP-08A Software & Connectivity
多様な制御インターフェース
搭載するマイコンにはWifiなどの無線通信機能が実装しており、バッテリーを搭載すれば完全ワイヤレスで稼働できます。また、マイコンに倒立振子などの制御プログラムを実装できればロボット単品で自立行動が可能です。
パソコンによるシュミレーションを検証し、物理ロボットに移行する場合や電源を十分に確保したい場合は有線による制御も可能です。
Wi-Fi(UDP)によるリアルタイム指令制御に対応。外部PCとの低遅延データ通信が可能。
シリアルUSB通信による安定したコマンド制御。テキスト/バイナリ双方に対応。
マイコン内に基本姿勢制御および簡易歩行アルゴリズムを実装。外部接続なしでの単体動作が可能。※動的倒立安定制御は追加実装対象となります。
将来的なROS2連携を前提とした設計。高次制御やAI連携への拡張性。
Technical Specifications
| Parameter | Value |
|---|---|
| Model Name | ZT-rovate-BP08A |
| Type | Biped Robot (Type-A) |
| Controller | M5Stack M5CoreS3 SE (ESP32-S3 / Wi-Fi / Integrated LCD) PCA9685 Servo driver |
| Battery | 12V以上のバッテリーに対応 ※別売※1 |
| DOF (自由度) | 8 Axis |
| Actuator | Hobby Servos Standard size DS3240 |
| Sensors | MPU6886 IMU |
| Communication | USB-Serial / Wi-Fi (UDP) |
| Structure | 3D Printed (PLA / PAHT-CF compatible) |
| Weight | Approx. 3.0 kg |
※本体は3Dプリンターで製作しています。一般的な民生品と比較して表面には積層痕があります。

※ロボットは専用スタンドに乗せているだけで固定していません。
Open Software
ロボットに実装しているマイコンのソフトウェアはオープンソース化とし、すでに公開されています。通信制御の確認用Pythonソフトウェアもtoolsのフォルダに格納されています。
開発環境の基本は VS Code + PlatformIO IDE です。DownloadZipを取得し、ローカルで展開するだけで即座に開発が始めれます。是非GitHubのルートフォルダにあるREADMEも軽く読んでください。
Offerings
ZT-rovate-BP08Aはオンラインにて購入可能です。
搭載マイコンの制御ソフトウェアはGitHub上で無償公開しており、導入後すぐにソフトウェア開発を開始できます。また、ロボット設計データ(CAD)はライセンス提供が可能であり、独自フレームの製作や構造改良を迅速に実施できます。
さらに、マイコン設計を含むハードウェア開発の受託にも対応しており、研究目的や事業用途に応じたカスタム開発を支援します。
rovateは、「購入」から「改良」、そして「共同開発」までを一貫して提供するロボティクス開発基盤です。
設計データ販売
Delivery record
rovateは、研究機関および教育機関に導入されています。
–
Frequently Asked Questions
よくあるご質問
本製品はソフトウェア開発者向けのプラットフォームであり、購入直後に自律歩行させることはできません。デモソフトウェアは無償で提供していますが、動的安定制御(倒立振子など)は研究者自身が実装する必要があります。制御アルゴリズムの開発・検証を加速するための基盤として設計されています。
回路はM5CoreS3SE + PCA9685でサーボを動かす構成になっています。その程度でも十分に挑戦できると思います。PCA9685やIMUのコーディングに関してはGitHubを見ていただくかネット上でも様々な方が評価していますので参考にしていけば大丈夫と思います。
このロボットの基本はM5CoreS3SE+PCA9685にサーボが8個つながっている状態です。その構成でサーボを動かすだけのコードでも試す事はできます。それで余裕があれば、マイコンの画面を作りこむとかIMUを使用するコードを追記していけば面白いと思います。
C++またはPythonの基礎的なプログラミング知識が必要です。開発環境はVS Code + PlatformIO IDEを推奨しています。GitHubからソースコードをダウンロードし、ローカル展開するだけで即座に開発を開始できます。ROS2やNVIDIA Omniverseの知識があればより高度な活用が可能です。
現在ROS2対応は準備中です。将来的なROS2連携を前提とした設計となっており、高次制御やAI連携への拡張性を確保しています。対応時期については随時GitHubおよび本サイトでお知らせします。
標準モデルはABS製です。耐熱・耐薬品性が求められる用途向けにPAHT-CF(カーボン配合ナイロン)でも製作可能です。3Dプリンター製のため表面に積層痕がありますが、研究・実験用途としての強度は確保しています。なお設計データのライセンス提供も行っており、独自改造や自社製造も可能です。
基本的にはWi-Fi(UDP)またはUSBシリアルのどちらか一方を用途に応じて切り替えてご利用ください。バッテリー搭載時は完全ワイヤレス(Wi-Fi)での稼働が可能です。シミュレーション検証後に物理ロボットへ移行する場合や安定した電力供給が必要な場合は有線(USB)制御を推奨します。
すべての設計データは2029年3月までに無償公開する予定です。それ以前にCADデータが必要な場合は、ライセンス提供(有償)にて対応しています。SolidWorks・STEP形式での提供が可能ですので、お問い合わせフォームよりご相談ください。
ページ下部のお問い合わせフォームよりご相談ください。4足歩行化、ロボットアームの追加、ROS2統合支援、マイコン設計を含むハードウェア開発まで幅広く対応しています。研究目的・事業用途に応じた専用カスタマイズが可能です。
Enquiries or bank transfer orders
※1:バッテリー本体の不具合・損害に関して弊社は責任を負いかねます。
©ZEATEC co.,ltd.